Real-Time Pothole Detection and Alert System Using Machine Learning and Computer Vision
This project utilizes Machine Learning to detect potholes in roads.
Tools & Technologies: Python, OpenCV, TensorFlow/Keras (or similar ML framework)
Status: Completed
Introduction
This project focuses on developing a real-time pothole detection and alert system using machine learning and computer vision techniques. The system aims to identify potholes on roads and provide timely alerts, which can be crucial for improving road safety and facilitating efficient road maintenance.
System Overview
Aim and Objectives
Aim:
To develop an accurate and efficient real-time pothole detection and
alert system using machine learning and computer vision.
Objectives:
The objectives of the project are outlined below:
- Collect and preprocess a dataset of road images containing potholes.
- Train a machine learning model (e.g., a convolutional neural network) to accurately identify potholes.
- Implement real-time video processing to detect potholes from a live feed.
- Develop an alerting mechanism to notify users or authorities about detected potholes.
- Evaluate the system's performance in terms of detection accuracy and speed.
Features & Deliverables
- Real-Time Detection: Identifies potholes in video streams or images with high accuracy.
- Machine Learning Model: A trained model capable of distinguishing potholes from other road features.
- Alerting System: Provides visual or auditory alerts upon pothole detection.
- Scalability: Designed to be adaptable for various road conditions and camera setups.
- User-Friendly Interface: (Optional, depending on implementation) A simple interface for displaying detection results.
Process / Methodology
Data Collection and Preprocessing
Gathered a diverse dataset of road images, including various lighting conditions, road types, and pothole sizes. Images were annotated to mark pothole locations. Preprocessing involved resizing, normalization, and augmentation to prepare data for model training.
Model Training
Utilized a deep learning framework (e.g., TensorFlow/Keras) to train a Convolutional Neural Network (CNN) for object detection. The model was trained on the annotated dataset to learn features indicative of potholes.
Real-Time Implementation
Integrated the trained model with OpenCV for real-time video stream processing. The system continuously analyzes frames, identifies potholes, and overlays bounding boxes or other visual indicators.
Alerting Mechanism
Developed a simple alerting system that triggers a visual alert on the display when a pothole is detected. This could be extended to send notifications (e.g., SMS, email) in a more complex system.
Testing and Evaluation
Tested the system with various video inputs and real-world scenarios to evaluate its accuracy, precision, recall, and processing speed. Fine-tuned model parameters and detection thresholds for optimal performance.
Software Workflow (Conceptual)

Challenges & Solutions
- Challenge: Variability in pothole appearance (size, shape, lighting, road
surface).
Solution: Used data augmentation during training and a robust CNN architecture to improve generalization. - Challenge: Real-time processing speed on limited hardware.
Solution: Optimized model architecture for efficiency and explored techniques like frame skipping or region-of-interest processing. - Challenge: False positives due to shadows, cracks, or other road
imperfections.
Solution: Refined training data and adjusted confidence thresholds for detection.
Results & Impact
- High Accuracy: Achieved a high percentage of accurate pothole detections in various test scenarios.
- Real-Time Performance: System demonstrated the ability to process video streams and detect potholes with minimal latency.
- Improved Safety: The system has the potential to significantly enhance road safety by providing early warnings of road hazards.
- Maintenance Efficiency: Can aid road maintenance crews by providing precise locations of potholes, leading to more efficient repairs.
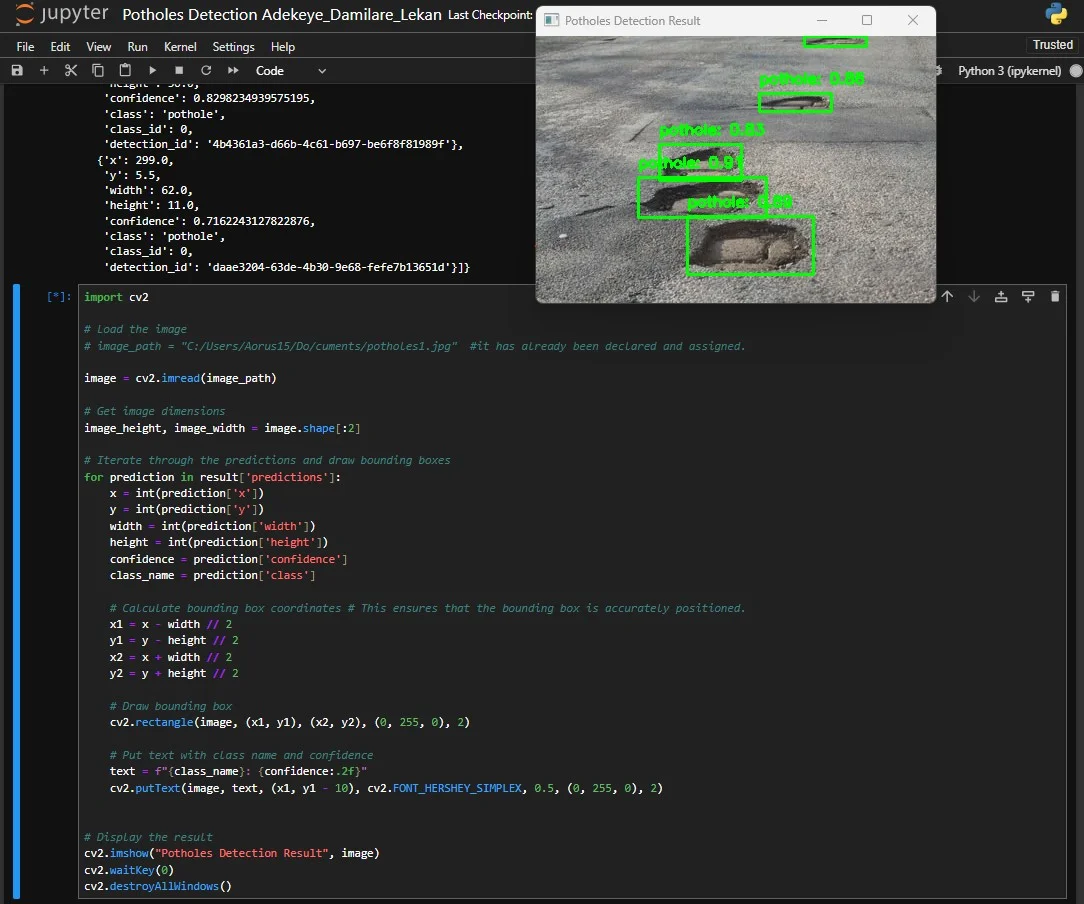
Sample Detection Output
What I Learned
- Practical application of machine learning and computer vision for real-world problems.
- Techniques for dataset preparation and augmentation in object detection.
- Optimization strategies for deploying ML models in real-time systems.
- The importance of robust error handling and false positive reduction in critical applications.
Demonstration & Access
- GitHub Repository: (Link to be added if available)
- Demo Video: (Link to be added if available)
Demo video placeholder (will be updated when available):
Code Snippet (Conceptual)
import cv2
import numpy as np
# Load pre-trained model (conceptual)
def load_model():
# This would load your trained ML model (e.g., TensorFlow, PyTorch)
print("Loading pothole detection model...")
# Placeholder for model loading logic
model = True # Assume model is loaded
return model
# Detect potholes in a frame (conceptual)
def detect_potholes(frame, model):
# Placeholder for actual detection logic using the model
# This would involve running inference on the frame
# and returning bounding box coordinates or masks
potholes = []
# Example: Simulate detection
if np.random.rand() > 0.7: # Simulate a 30% chance of detecting a pothole
x1, y1 = np.random.randint(0, frame.shape[1] - 100), np.random.randint(0, frame.shape[0] - 100)
x2, y2 = x1 + np.random.randint(50, 150), y1 + np.random.randint(50, 150)
potholes.append(((x1, y1), (x2, y2)))
return potholes
# Main function for real-time detection
def main():
model = load_model()
if not model:
print("Failed to load model. Exiting.")
return
cap = cv2.VideoCapture(0) # Use 0 for webcam, or provide video file path
if not cap.isOpened():
print("Error: Could not open video stream.")
return
while True:
ret, frame = cap.read()
if not ret:
break
potholes = detect_potholes(frame, model)
for (x1, y1), (x2, y2) in potholes:
cv2.rectangle(frame, (x1, y1), (x2, y2), (0, 0, 255), 2) # Red rectangle
cv2.putText(frame, "Pothole!", (x1, y1 - 10), cv2.FONT_HERSHEY_SIMPLEX, 0.9, (0, 0, 255), 2)
cv2.imshow("Pothole Detection", frame)
if cv2.waitKey(1) & 0xFF == ord('q'):
break
cap.release()
cv2.destroyAllWindows()
if __name__ == "__main__":
main()Future Enhancements
- Integrate GPS data to log pothole locations for mapping and reporting.
- Develop a mobile application for real-time alerts and user-contributed pothole reports.
- Explore deployment on edge devices (e.g., Raspberry Pi, Jetson Nano) for in-vehicle systems.
- Implement a feedback loop for continuous model improvement based on new data.
Thank You for Visiting My Portfolio
I sincerely appreciate you taking the time to explore my portfolio and learn about my work in machine learning and computer vision. This project highlights my dedication to leveraging technology for practical, impactful solutions.
If you have any questions, require further information, or wish to discuss potential collaborations, I would be delighted to connect. Please feel free to reach out via the Contact section. Your feedback and inquiries are highly valued and will be addressed promptly.
Thank you once again for your interest in my work. I look forward to the opportunity to collaborate and contribute meaningfully to your projects or organization. Together, let us innovate and achieve excellence.
Best regards,
Damilare Lekan, Adekeye.